飞凡汽车前后融合算法双轨并行 打造全要素 全方位观测周期融合技术
自动驾驶技术正在悄然改变我们的出行模式。它像魔法一样,利用高科技的传感器和智能算法,赋予汽车超凡的感知能力和决策智慧。这些智能车辆不仅大大提升了行车的安全系数,让驾驶者远离了因疏忽而引发的危险,更在无形中优化了道路资源的使用,巧妙地化解了交通拥堵的难题,让城市交通变得更加流畅高效。此外,自动驾驶的广泛应用还催生了绿色出行的新风尚,它通过精确导航和减少无效行驶,帮助我们节约宝贵的能源,减少了环境污染的排放。而最终,这一切的努力,都是为了给我们带来前所未有的出行体验——轻松、舒适、无忧无虑。

中商产业研究院发布的《2017-2027全球及中国自动驾驶行业深度研究报告》揭示,中国正逐步将量产乘用车的自动驾驶等级从L2提升至L3+。到2023年,中国新车市场中,L1级自动驾驶技术的渗透率已达到11%,L2级为51%,而L3和L4级分别占20%和11%。为了推动自动驾驶技术的进步,各国政府正在加强政策支持,例如中国发布了《智能网联汽车道路测试管理规定》。自动驾驶技术的核心是人工智能,它使汽车能够独立感知、决策和执行。其中,感知技术是自动驾驶的基石,决定了自动驾驶系统的整体表现。早在2004年,斯巴鲁与日立汽车系统合作开发了立体摄像头技术,用于获取车辆环境信息。这一技术发展成为斯巴鲁的EyeSight系统,成为业界首款基于感知的驾驶辅助系统,能够检测多种障碍物并实现预碰撞制动、自适应巡航等功能。在日立技术的不断升级下,EyeSight系统进一步增加了行人检测、碰撞预警刹车等功能,显著提高了驾驶的安全性。
自动驾驶技术正以前所未有的速度发展,得益于先进的传感技术——包括高清摄像头、精准的毫米波雷达、以及尖端的激光雷达等——现代自动驾驶汽车已能够在多变的环境中实现自我导航。目前,关于自动驾驶的感知技术路线,业界主要聚焦于“纯视觉系统”与“多传感器融合系统”这两大对立策略,这场关于未来自动驾驶最佳路径的辩论,已然成为该领域最具争议的话题。
“纯视觉”感知方案
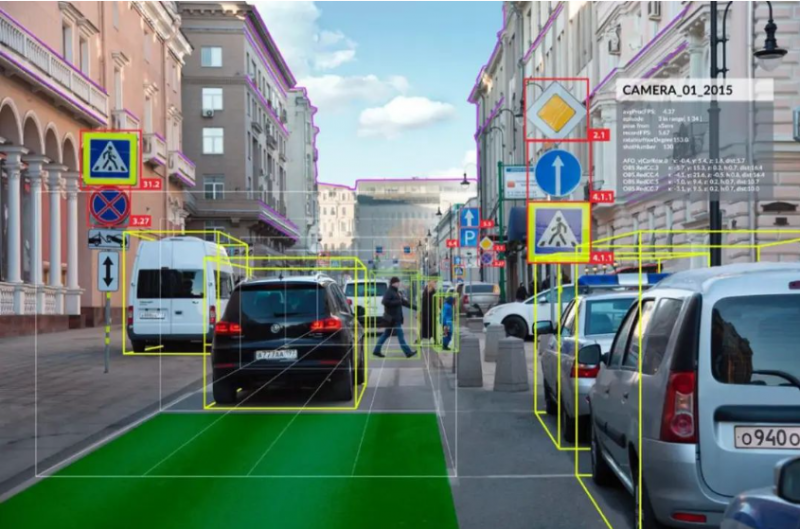
纯视觉系统,宛如车辆的“第三只眼”,凭借车身四周精心布局的高清摄像头,以人眼无法企及的精度捕捉着每一个细节。这些摄像头如同敏锐的守护者,时刻注视着车辆的四周,无论昼夜,无论晴雨,都能确保360度无死角的环境感知。
这个系统的核心在于其强大的数据处理能力。海量的图像数据通过高速传输,被送往车载计算机进行深度解析。在这里,AI技术发挥着举足轻重的作用,它像是一位智慧的导师,指导着计算机如何更好地理解这些图像数据,将其转化为有意义的环境信息。
随着科技的不断进步,高清摄像头技术已经日新月异,能够捕捉到更加清晰、流畅的图像。而AI技术的广泛应用,更是让自动驾驶系统的感知能力达到了前所未有的高度。现在,车辆不仅可以看到周围的环境,还能理解这些环境,预测未来可能发生的情况,从而做出更为明智、安全的驾驶决策。
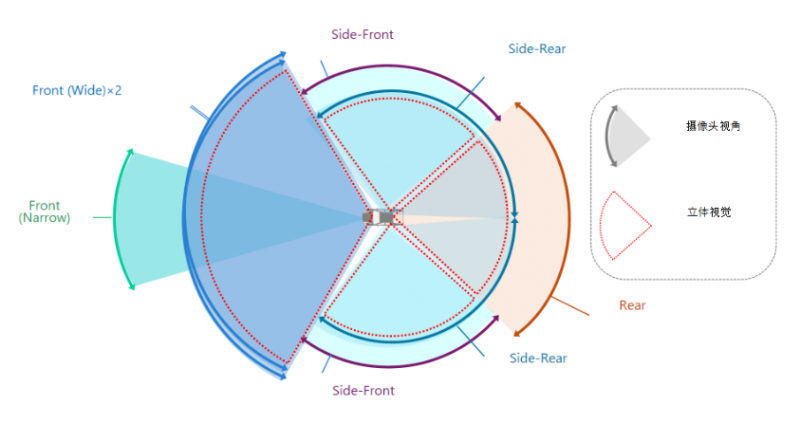
在汽车行业,特斯拉和斯巴鲁是两家采用纯视觉方案的代表企业。特斯拉的Model 3和Model Y在美国和欧洲市场上,通过纯视觉方案不仅保持了原有的主动安全等级,甚至有所提升,特别是在行人自动紧急制动(AEB)方面表现出色。这得益于特斯拉强大的视觉处理能力和8个摄像头组成的360°全景监控系统,能够在250米外监测到周围环境。
与此同时,斯巴鲁也积极探索纯视觉方案。自2004年起,斯巴鲁就与日立汽车系统合作开发了先进的立体摄像头技术。经过二十年的不断发展,日立安斯泰莫推出了基于左右分离型双目立体视觉相机的3D free space技术,这项技术能够通过3D感知技术处理未学习过的物体,形成高精度的可行驶区域,从而在危险来临时避开障碍物,确保车辆安全行驶。
值得一提的是,日立安斯泰莫最新的技术通过自动校准技术优化了左右摄像头的画面,提高了立体识别技术的安装灵活性,并支持聚焦客户感兴趣的区域。这种基于物理测量的双目立体视觉技术相较于单目摄像头依赖逻辑推理和大数据训练的测距方式,具有更高的精确度。
此外,基于双目立体视觉技术的自动驾驶系统还可以根据汽车制造商的需求进行个性化配置。通过多组摄像头的灵活布局,可以实现360度的3D测距和更好的驾驶环境把握。这种系统不仅可以在交叉路口实现直行及转弯时的自动紧急制动(AEB),还可以基于远距离物体检测实现自适应巡航控制(ACC),而无需大幅增加相机的像素数。
综上所述,纯视觉方案在汽车行业的应用日益广泛,特斯拉和斯巴鲁等企业通过不断创新和技术升级,推动了这一领域的发展。未来随着技术的进一步进步和应用场景的不断拓展,纯视觉方案有望在汽车行业中发挥更加重要的作用。
“多传感器融合”感知方案(上汽飞凡汽车)
在智能驾驶领域的发展中,厂商们逐渐认识到单一传感器的局限性。为了克服这一挑战,他们纷纷将目光投向了激光雷达,将其作为摄像头的得力助手和可靠备份。通过这种“视觉为主导,激光雷达为辅”的融合智能驾驶系统,厂商们成功构建了一个更加全面和稳定的环境感知体系。
这种融合感知方案巧妙地结合了激光雷达、毫米波雷达等先进设备的回波反射技术,以及摄像头的视觉信息。它们相互协作,既能互为补充,又能相互增强,为智能驾驶提供了强有力的支持。
在具体实施中,融合感知方案呈现出“前融合”和“后融合”两种主要策略。前融合注重在原始数据层面进行融合,通过统一的算法处理来自各个传感器的原始数据,从而获得一个综合且准确的感知结果。而后融合则是在传感器各自独立完成感知任务后,再进行目标数据的融合。这种策略对算力和算法的要求相对较低,更有利于传感器的即插即用和模块化设计。

值得一提的是,最新的“全融合”技术已经崭露头角。这种技术将前融合和后融合的优势相结合,通过进一步的数据处理和算法优化,实现了对环境更全面、准确的感知。上汽飞凡汽车的智驾系统RISING PILOT就率先采用了这一行业创新技术,凭借33个顶级高阶感知硬件的强大支持,将前融合与后融合两种算法完美融合,为用户带来了更加安全、便捷的智能驾驶体验。
上汽飞凡汽车的智驾系统RISING PILOT首次引入行业领先的Full Fusion全融合技术,这一创新算法通过整合前融合和后融合的数据处理方式,以及先进的多传感器融合策略,实现了对环境的全面且精确感知。借助33个顶尖传感器硬件,包括全球首个量产的LUMINAR 1550nm高规激光雷达和采埃孚Premium 4D成像雷达等,该系统能够实时捕捉并分析大量环境数据,确保行车安全。
Full Fusion算法的核心在于其独特的数据处理流程。首先,通过前融合技术处理原始传感器数据,提取关键特征;然后,利用后融合算法对初步处理的数据进行深入分析,形成独立的感知结果。最终,系统将两种结果进行融合比对、校验,以获得更高精度和更优计算效率的感知结果。
得益于高性能芯片的支持,RISING PILOT智驾系统能够在毫秒级内完成感知、融合、预测、决策、执行等一系列复杂任务,满足L3-L4级自动驾驶的算力需求。这种全融合技术的应用,不仅提升了上汽飞凡汽车的驾驶体验,也为自动驾驶技术的发展树立了新的标杆。
相关文章: